8. Transmitter Menu¶
8.1. Transmitter config¶
設定画面では、様々な送信機機能を定義します。Main menuから「Transmitter menu」「Transmitter config」の順に選択します。この項目のすべての画面はDeviationのデフォルト設定を示しています。
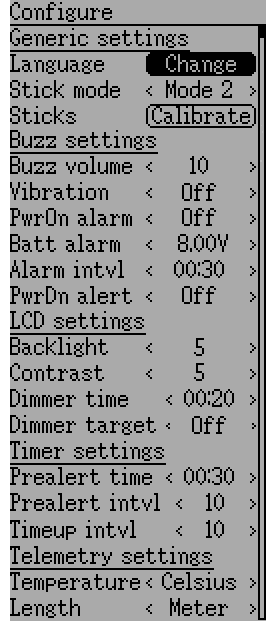
8.1.1. Generic settings¶
注: この機能はDevo7eでは使用できません。
Stick mode: Mode 1-4のいずれかを選択してください。
- Mode 1はヨーロッパでは一般的なモードです。左側はエレベーターとラダー、右側はスロットルとエルロンとなります。
- Mode 2は北米で一般的なモードです。左側はスロットルとラダー、右側はエレベーターとエルロンとなります。
- Mode 3は左側にエレベーターとエルロン、右側はスロットルとラダーになります。
- Mode 4は左側にスロットルとエルロン、右側はエレベーターとラダーになります。
Sticks: すべてのアナログスティックとダイヤルの範囲を調整します。
スティックキャリブレーションを実行するには「Calibrate option」をハイライト表示してENTボタンを押します。画面の指示に従ってスティックを動かしENTボタンで確認します。
8.1.2. Buzzer settings¶
Power On alarm: 送信機がアクションなしでONとなった場合に通知されるアラームの間隔を選択します。有効範囲は1分間隔で0〜60分です。
Battery alarm: アラームが鳴るバッテリー電圧を設定します。電圧範囲は0.01V刻みで3.30V〜12.00Vです。
Alarm interval: バッテリー残量が少なくなったときの警報頻度を設定します。警報間隔は5秒間隔で5秒~1分まで設定できます。無効にすることもできます。
Buzz volume: ブザー音量を設定します。利用可能な範囲は1~10です。ブザー無効にすることもできます。
Vibration: 可能な場合、アラームのバイブレーションを有効にします。
Power-down alert: 電源OFF時に音を鳴らします。
8.1.3. LCD settings¶
Backlight: 画面の明るさを設定します。有効範囲は1~10です。また無効にすることもできます。
Contrast: 画面のコントラストを設定します。有効範囲は1~10です。また無効にすることもできます。
Dimmer time: 画面が暗くなるまでの遅延時間を設定します。遅延時間は5秒間隔で5秒~2分に設定できます。Offに設定すると、送信機が電源ONしている限りバックライトは明るいままになります。
Dimmer target: 薄暗くなったときの画面の明るさを設定します。有効範囲は1~10で、無効にすることもできます。
8.1.4. Timer settings¶
Prealert time: タイマーがゼロに達してビープ音が鳴るまでの時間。有効範囲は5秒間隔で5秒~1分で、無効にすることもできます。
Prealert intvl: タイマーがゼロになる前にビープ音を鳴らす頻度。間隔は1〜60秒の範囲で設定でき、無効にすることもできます。
Timeup intvl: タイマーが切れ、ビープ音を鳴らす頻度。間隔は1〜60秒の範囲で設定でき、無効にすることもできます。
8.1.5. Telemetry settings¶
Temperature: テレメトリー表示させる温度の単位を設定します。利用可能なオプションは摂氏と華氏です。
Length: テレメトリー表示させる距離の単位を設定します。 選択の選択肢はメートルとフィートです。
8.2. Channel monitor¶
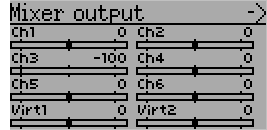
Channel monitor画面は、送信機による各チャンネルの出力値をユーザが閲覧することを可能にします。ミキサーのないチャンネルは表示されません。表示されるチャンネル出力は、スケーリングに合わせ最小 / 最大値に基づく値となります。
Example: -60~+60までのチャンネルスケールは、スティックの位置に応じて-60~+60までの範囲の値を表示します。
8.3. Input Monitor¶
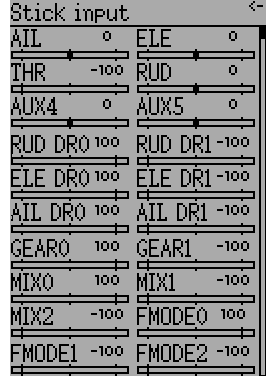
Input monitor画面には、コントロールポイントの現在位置に関連値が表示されます。表示される値は-100%~+100%までのスケールに基づいた合計範囲のパーセンテージです。
注: Devo7eはAIL、ELE、THR、RUD、HOLD0、HOLD1、FMOD0、FMOD1に制限されています。
8.4. Telemetry monitor¶
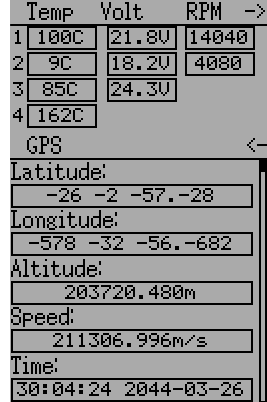
特定のプロトコルは、使用中にテレメトリーデータを送信機に送り返すことができます。テレメトリーデータは、GPS関連情報などに限定されず、温度測定値や様々な電圧測定値、モーターまたはエンジン回転数などが含まれます。
テレメトリーデータは、DEVOとFrSkyを除く、サポートされているすべてのプロトコルでデフォルトでOFFになっています。対応する9つのプロトコル項目を参照し、どのプロトコルがテレメトリーをサポートしているかを調べ、どの項目が利用可能になるかを確認してください。
各プロトコルは返信することができるデータの種類が異なるため、このデータを収集するためにどのような追加ハードウェアが必要となるかについては、対象メーカーのドキュメント等を参照してください。
有効なデータが送信されるまで、値はすべて反転されます。

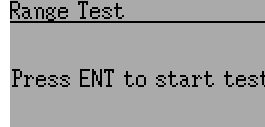
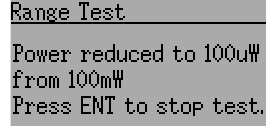
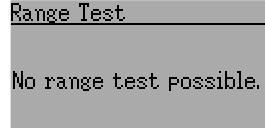
8.5. Range Test¶
最初に、実飛行する前に新しい機体との通信レンジテストを行い、通常の飛行距離にて機体を制御できるか確認することをお勧めします。いくつかの団体では、これは安全対策として必要となります。Range test画面はこれを可能とします。 Range test画面を開いたら「Start test」ボタンを押して通信レンジテストを開始します。新旧の電力レベルが表示されます。その後の標準的な手順は、約30メートル離れたところから、まだ機体を離陸させず操作の確認をします。その後「Stop test」ボタンを押して通信レンジテストを終了し、設定されている無線の電力レベルを元の値へ復帰させることができます。設定画面を終了するため「EXT」ボタンを押すことでも、同様に電力レベルを元に戻します。 無線の通信レンジは電力レベルの変化の平方根によって減少します。したがって100mWから100μWへの変位は約1000の値の電力の変化、つまり30mを少し上回る範囲の距離の減少を表します。したがって通常の30mの距離テストでは、機体を900mまで制御できるはずです。 現在の機体に装着されるRFモジュールにはパワーアンプ:PAが必要です。それ以外の場合、または機体に選択されている電力レベルがすでに最小値になっている場合は、その旨のメッセージが表示されます。 |
|